
Counter & Timer
Counter and timer devices provide solutions for various measurement requirements including measuring a duration between two events or counting events. This is usually accomplished by edge detection of the input signal. Counters usually support counting up- or downwards depending on the status of the direction input signal. In some applications it may be necessary to temporarily disable the counter which can be achieved by provision of control lines. In many industrial or scientific applications where motors, wheels and shafts are used, it is necessary to determine the angular velocity or to monitor the position of a linear or rotary drive with the aid of quadrature encoders or Gray code encoders respectively.
Quadrature encoders
Quadrature encoder require two input signals and detect the angular rate from the pulse-train frequency and the direction from the phase shift. The CNT01 Quad Quadrature Encoder is a versatile and easy-to-use quad absolute counter or quadrature encoder. It comprises four independent counters which can be configured separately. All inputs are TTL / CMOS compatible and the maximum counting frequency is 40 MHz. Moreover, the counter can temporarily be disabled by the use of a digital input line.
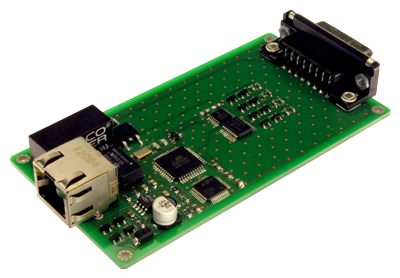
CNT01 Quad Quadrature Encoder
The CNT01 is a versatile and easy-to-use quad absolute counter and quadrature encoder. Every counter supports the up/down counting mode to detect impulses of an arbitrary clock source as well as the quadrature encoder mode which is usually utilized to count the revolutions per minute of a spinning shaft or motor. Every counter is equipped with a separate enable line which inhibits it from capturing impulses as long as being active. Every digital input line is continuously over-voltage protected which is especially important if inductive pick-up coils are utilized to detect the position of the shaft.
The versatility and the straightforward usability make the device ideal for industrial applications as well as for scientific experiments. The position or angular velocity of a spinning axle can easily determined as well as accurate duration measurements can be performed if the pulses of an external reference clock are counted.
Features
- Connected to 10/100BASE-TX Ethernet over RJ45 jack
- Four independent counters / quadrature encoders
- Software-configurable up/down counter or multiple quadrature encoder modes
- Every counter has its separate enable signal
- Internal pull-up resistors ensure minimum wiring efforts
- 40 MHz maximum frequency as up/down counter and 5 MHz in quadrature mode
- Internal +5 V / 200 mA power supply for arbitrary use
- Continuous over-voltage protected pins up to ±30 V
- Surveillance of all voltages and board temperature
- Powered via PoE (Power over Ethernet)
- Idle power consumption of less than 1.2 W
- Compatible with all modern Ethernet standards
- Drivers for Microsoft® Visual C++™, MathWorks® MATLAB™, Python and National Instruments® LabVIEW™ programming environment
Documents
CNT01 Datasheet (288kB) Python Programming Manual (April 2022, 274 kB)NI® LabVIEW™ Programming Manual (April 2022, 387 kB)MathWorks® MATLAB™ Programming Manual (April 2022, 289 kB)Drivers
Python 3 Library for Microsoft Windows, Apple macOS, Linux and Raspberry Pi (October 2023, 1318 kB).zipNI LabVIEW 8.6, 2009-2023 Library for Microsoft Windows, Apple macOS and Linux (November 2023, 1545 kB).zipMicrosoft Visual C++ 2015, 2017, 2019, 2022 Library for Microsoft Windows (October 2023, 27461 kB).zipMathWorks MATLAB 2008-2023 Library for Microsoft Windows and Linux (October 2023, 869 kB).zipAccessories
Price
€ 599.00
